在汽车制造等大规模生产中,螺柱漏焊被视为最严重的质量事故之一,轻则导致下游工序(如内饰装配)返工,重则影响车身结构强度与功能安全。PIDS-A20AT自动螺柱焊接系统作为鸿栢科技第四代全数字产品,不仅具备强大的焊接能力,更从底层设计了一套包含硬检测、软闭环、分布式报警和系统级追溯的防漏焊体系。本文旨在深度剖析这套体系如何从焊机本身的功能,通过工业通信(DeviceNet)与上位控制系统(PLC/Robot)无缝集成,最终转化为线体的整体防错能力。
第一章 引言:自动化生产中的漏焊风险与控制挑战
在汽车白车身的焊接生产线上,一台机器人可能需要在数十秒内完成多颗螺柱的连续焊接。在高速节拍下,螺柱送料卡滞、意外短路、板材波动(如0.65mm镀锌板)等微小扰动,都可能导致焊点虚焊或完全漏焊。然而,单纯的焊机本身只能“感知”当前焊接过程,无法判断一个工件是否“焊完了所有螺柱”。真正高效且专业的防漏焊,必须完成从“单机感知”到“系统统筹”的跃迁。文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
PIDS-A20AT的优势恰恰在于:它不仅是一台焊机,更是一个包含高实时性通信接口、多功能传感与可编程逻辑的数据节点。它能够将焊接过程的状态数据(计数、异常编码、能量值) 实时上传给线体主控;同时,也能接收来自主控的生产指令(总点数、当前点号、补焊命令),从而在系统层面实现全流程的防漏焊管控。文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html

第二章 PIDS-A20AT 防止漏焊的内生硬件与软件功能
在进入线体集成之前,我们必须理解PIDS-A20AT自身所具备的、构成防漏焊体系的基础功能模块。这些功能是“系统闭嘴”的硬件基石。文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
2.1 基于光电与机械信号的“螺柱有无”传感机制
漏焊的前提往往是“无钉空焊”。PIDS系统通过本体的输入接口(I/O板,参考《第14章配线图》)精准侦测螺柱状态:文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
- 接触垂直信号: 这是焊接开始的第一道逻辑门。焊枪下压,螺柱接触工件时,系统才认为具备焊接条件。如果无钉或螺柱未能正确送入,该信号保持低电平。
- 重复送钉策略: 根据《第10章焊接异常篇》,当主机发出焊接命令后,如果未检测到接触垂直信号,系统不会立刻报错。它会先向FRS5送料机再请求一次送钉。只有二次送钉后依然无钉,才认定异常。这种“一次失败,再给机会”的机制,有效规避了因偶发送料抖动导致的误判停机。
2.2 焊接异常的多维度实时判据
即便螺柱就位,焊接过程中的微小偏差也需要被识别,以防“虚焊”冒充“合格焊点”。PIDS系统在焊接循环中实时监控多个特征量:文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
根据《第10章焊接异常篇》:文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
- 引弧失败(Arc Ignition Failure): 先导电流阶段,输出电流小但弧压高,说明电弧断弧,连接未建立。
- 焊接开路(Open Circuit): 先导电流小、弧压低,主回路形成不了有效短路或电弧,意味着电流未流经螺柱-工件接合面,这是一个强烈的漏焊预兆。
- 弧压偏低(Low Arc Voltage): 电流正常但弧压低,说明焊枪提升高度未达设定值,实际熔深不足。这种“焊了,但没焊好”的状态会被立即捕捉。
- 能量偏低(Low Energy): 进入大电流阶段后,实际输出的能量低于期望值。由于螺柱焊接的熔池形成高度依赖于精准热量积算,能量偏低直接宣告该焊点不合格。
2.3 硬件级计数报警:点数的“铁证”
这是PIDS系统防止漏焊最硬核的物理保障。根据《第15章综合控制管线包篇·4 计数报警器》:文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
- 功能定位: 独立于主机控制逻辑的硬件辅助单元,专门针对单个工件或某个工位的焊接通道进行点数统计。
- 报警触发逻辑: 系统可预设“该工件应焊接螺柱总数”。当操作工尚未完成所有点位便挪动工件,或系统因故障中途停止时,若计数值未达标,报警器将输出声光/电气信号。这个信号可以直接打断机器人循环或锁定夹具放行开关,从物理上阻止“欠焊工件”流入下一工位。
2.4 灵活的后处理:补焊与跳点操作
在手持编程器的“焊接数据”页面(第11章),内置了一个关键的“缺陷应对”界面。文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
- 焊点补焊: 当罗列异常发生后,如果判定当前焊点没焊上,操作员可指令PIDS在当前位置(机器人不移动)再执行一次完整的焊接命令。该命令会重新触发送钉和焊接循环。
- 焊点跳过: 如果已有螺柱但焊接不良(如弧压偏低),且现场不允许重焊(如破坏工件),可跳过当前计数点,系统自动扣除该点计数,保证总点数逻辑的准确性。
第三章 功能系统集成:基于DeviceNet的“焊机-机器人”闭环防错控制
如果仅依靠焊机本身的报警灯,操作员仍需肉眼观察、手动处置,效率低下。PIDS-A20AT的完整价值体现在它如何通过实时工业总线成为机器人/PLC大脑的“精准触手”。基于《第8章DeviceNet通信接口》和《第9章通信协议简表》的深度解析,集成逻辑如下:文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
3.1 信号分类:数字焊点的“心跳”与“诊断码”
PIDS与上位机交换的数据分为两类:文章源自好焊孙辉博客 https://www.sunhui.me好焊孙辉-https://www.sunhui.me/weldgyzb/autoweld2026061875.html
- 状态/命令位(位数据): 用于同步基本节拍。
- 参数/诊断字(字节数据): 用于传输工艺编号和异常编码。
3.2 核心防漏焊交互协议
| 信号名称(PIDS→主机) | 信号含义 | 在防止漏焊中的价值 |
|---|---|---|
| 点焊通知 | 每次焊接(不论成败)的完成信号 | Robot计数器+1,判断是否到达预设总点数 |
| 故障信号 | 系统安全报警(如IGBT过温) | 立即停止机器人,防止在系统不稳定状态下产生批量废品 |
| 焊接意外终止信号(关键) | 1:本次焊接失败 | 漏焊核心判据。Robot收到此位后,必须结合“工艺开始”信号进行逻辑判断 |
| 钉量不足信号 | 送料机料斗缺钉 | 提前预警,防由于料斗无钉导致的批量漏焊 |
反向信号(主机→PIDS):
| 信号名称 | 信号含义 | 在防止漏焊中的价值 |
|---|---|---|
| 补焊指令 | Robot要求PIDS在当前位置重新焊接 | 实现完全自动化的漏焊补焊,不需要人工干预 |
| 清除意外终止信号 | Robot确认故障可忽略,准备下一轮 | 保证生产节拍,避免因一次漏焊导致整线停摆 |
3.3 集成应用实例:防止“工件内螺柱数量不足”的控制流
假设某工件应焊接5颗螺柱。机器人控制系统内部变量设定 TotalCount = 5。
步骤流:
- 焊前: Robot打开到位,夹具夹紧后,PLC复位计数器
CurrentCount = 0。 - 焊中:
- Robot带着焊枪到达第一点,发送“焊接命令”上跳沿。
- PIDS焊接完成(无论是否成功),都会向Robot发送“点焊通知”。
- Robot收到后,执行
CurrentCount = CurrentCount + 1。 - 若本次焊接失败,PIDS将“焊接意外终止信号”保持为1。
- Robot判断:若
CurrentCount < TotalCount且“意外终止”=1,则自动发送“补焊指令”(上跳沿)。PIDS原地重焊。 - 若补焊成功,信号变为0;若再次失败,Robot可设定“补焊N次仍失败则报警”。
- 焊后:
- 当Robot焊完第5点后,检测
CurrentCount = TotalCount。 - 如果
CurrentCount != TotalCount,机器人封锁下料程序,屏幕弹窗“工件漏焊,严禁流出”。
- 当Robot焊完第5点后,检测
这个闭环的价值在于:将单纯的焊机异常码,转化为机器人的轨迹与计数判断,实现了“焊机-机器人-PLC-工厂MES”的数据联通。
第四章 线体级集成应用全景:从焊前准备到质量追溯
基于上述单机功能和总线交互,我们可以构建一个覆盖全生命周期的线体集成防漏焊方案。
| 阶段 | 集成对象 | PIDS-A20AT的贡献 | 防漏焊作用 |
|---|---|---|---|
| 焊前准备 | MES/机器人 | 接收 TotalCount 设定值;上电自检完成,空循环确认信号正确 |
防止因系统未就绪而盲目开始焊接 |
| 焊中监控 | PLC/机器人 | 实时反馈 焊接成功/失败位;上传钉量不足信号;提供采样点地址给机器人 | 自动补焊、实时防错、预防性维护 |
| 焊后处理 | PLC/上位机 | 上传异常码;上传焊接数据(电流/时间/能量) | 质量门判;数据追溯;设备健康度评估 |
4.1 空循环与示教安全
在机器人示教路径时,PIDS支持 “输出电流允许”位(参考第7章)。当此位为0时,即使机器人发送焊接命令,焊机仅输出“焊接完成信号”,绝不输出焊接能量。这确保了示教人员在设置路径时,不会因误触发而导致螺柱射出或形成过烧,同时保证了整个生产逻辑的完整性。
4.2 群控与信息化延伸
根据《第15章》中的描述,PIDS支持群控系统。在大型自动化产线中,多台PIDS主机可被统一管理。焊接数量、异常频率数据可实时上传至制造执行系统(MES)。例如,当MES检测到某台PIDS在连续几个循环中均出现“能量偏低”告警,系统可自动锁停该通道,并请求维护人员进行钳口/电缆检查,在漏焊发生前就消除隐患。

4.3 软件集成与数据上云
知识库《PIDS螺柱焊培训.pptx》提到,主机拥有USB、以太网接口,配合监控软件可实现“实时分析及网络化功能”。这意味着焊接波形、电流真有效值、异常发生时点均可记录。这不仅能精确追溯某漏焊事故的具体责任设备(是焊枪问题还是电网波动?),还能利用大数据分析,定位最易导致漏焊的薄板/厚板模型参数。
第五章 针对特殊材料的应用集成注意事项:镀锌板与铝材
值得注意的是,PIDS系统的防漏焊功能不仅适用于钢制螺柱,同样针对易产生虚焊的铝制螺柱和薄镀锌板进行了优化集成。
5.1 铝制螺柱焊接的特殊集成要求
根据《第5章铝制螺柱焊接工艺篇》,铝制焊接对保护气体和脉冲功能有硬性依赖。如果未通过上位机通信打开“保护气体提前时间”开关,或未设置“基值电流”,铝焊点的虚焊概率极高。 集成方案中,PLC必须在调用铝焊工艺编号时,自动将“保护气体开关”置为有效,以确保气体提前流出,否则PIDS应拒绝焊接并上传异常。这正是系统级防止漏焊的体现——工艺参数配置不当立即被视为非法操作。

5.2 镀锌板与高强度板焊接的能量锁定
焊接镀锌板时,锌蒸气极易破坏电弧稳定性。PIDS的“AQC2主动质量控制技术”(参考知识库)通过实时调整输出,补偿锌层干扰。在系统集成中,机器人必须在焊接关键镀锌板工位时,强制锁定工艺组别(如焊接时间设定范围),不允许操作员随意调用适用于普通钢板的参数进行焊接,从源头防止因参数错误导致的虚焊漏焊。
第六章 超越“焊得上”,实现“焊得准,管得住”
PIDS-A20AT自动螺柱焊机并非一个孤立的能量源。它的价值核心在于其强大的传感器网络、多层级异常处理逻辑、以及开放透明的工业通信协议。通过将“计数报警”、“异常诊断”、“补焊请求”与“钉量检测”这些底层功能,通过DeviceNet/Profinet等总线集成到机器人/PLC决策中心,现代焊装线得以构建一个从单点感知到系统统筹的闭环零漏焊体系。
任何试图单纯依靠焊机本体指示灯来防止漏焊的做法,在高度自动化的产线均属失职。只有像PIDS-A20AT这样,将其每一帧实时数据、每一个异常位码都转化为机器人的动作指令和工厂的MES数据,才能真正实现从*“焊得上”到“焊得准,管得住”*的质变。

个人展望: 随着智能化浪潮发展,基于PIDS强大的数据处理能力,利用AI图像识别焊接波形以提前0.5ms预判“漏焊”风险,并将其通过总线,在机器人下一个点位调整工艺参数,将是下一代智能防漏焊体系的核心方向。
PS:(所有核心技术与功能均引用自鸿栢科技PIDS螺柱焊机说明书资料,文章提到的第几章请参考产品说明书,本文也是笔者就最近客户提到的一些问题点的学习记录,分享给我的客户和有需要的朋友们,希望大家能踊跃参与讨论分享自己的经验,谢谢)

| 本群成立的宗旨:打造问诊式汽车制造四大工艺技术服务、从装备零配件到装备、工艺及各种技术服务的全产业链平台,本群聚焦传统燃油汽车,新能源汽车,纯电动汽车及相关产业领域,为整车生产厂商和零部件制造厂商工程师、技术人员、采购人员提供相关的资讯、技术和产品信息。本群属于实名制群,请大家共同爱护群,不接受任何广告户,换群的人进群!加微信群二维码过期请加博主微信 18682260315 邀请加入! |
 本知识库成立的宗旨:打造问诊式汽车制造四大工艺技术服务、从装备零配件到装备、工艺及各种技术服务的全技术服务平台,本知识库可以为整车生产厂商和零部件制造厂商工程师、技术人员、采购人员提供相关的技术资讯、工艺技术支持和装备推荐信息。想成为共创者的朋友请加博主微信 18682260315 邀请加入!欢迎各大装备商朋友扫描关注体验! |
博主推荐阅读:
携手共建汽车四大制造工艺装备AI知识库,共创智能焊接新未来
深度技术分析:短周期拉弧螺柱焊机工艺参数调试方法与工程实践
告别虚焊与磁偏吹:螺柱焊夹具及接地系统设计规范精解
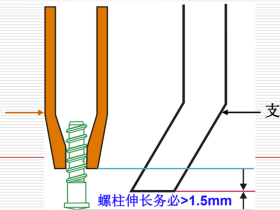
鸿栢科技螺柱焊枪支撑杆的作用与最佳调节方法
 博主现就职于深圳市鸿栢科技实业有限公司, 从事焊接设备营销推广及销售工作15年,拥有丰富的行业经验及资源,致力于中国汽车焊接设备营销推广,欢迎广大汽车制造焊接工艺与车身新材料连接技术研究的朋友们一起探讨新技术、新设备。
博主现就职于深圳市鸿栢科技实业有限公司, 从事焊接设备营销推广及销售工作15年,拥有丰富的行业经验及资源,致力于中国汽车焊接设备营销推广,欢迎广大汽车制造焊接工艺与车身新材料连接技术研究的朋友们一起探讨新技术、新设备。
螺柱焊机,点焊机,电极帽修磨机及各种焊接设备备件易损件,备件采购联系:18682260315
铝螺柱焊机哪家专业:什么是定义“专业”的关键?